.jpg)

Meet DARPA’s Newest X-plane: XRQ-73
The Series Hybrid Electric Propulsion AiRcraft Demonstration program, known as SHEPARD, has received its official X-plane designation: XRQ-73.
SHEPARD is an "X-prime" program, leveraging the series hybrid electric architecture and some of the component technologies from the earlier AFRL/IARPA Great Horned Owl (GHO) project.
"The idea behind a DARPA X-prime program is to take emerging technologies and burn down system-level integration risks to quickly mature a new missionized long endurance aircraft design that can be fielded quickly," said Steve Komadina, SHEPARD program manager. "The SHEPARD program is maturing a specific propulsion architecture and power class as an exemplar of potential benefits for the Department of Defense.”
The DARPA team includes members from the Air Force Research Laboratory (AFRL), the Office of Naval Research (ONR), and our warfighters.
The prime contractor for SHEPARD is Northrop Grumman Corporation’s Aeronautics Systems sector in Redondo Beach, CA. Scaled Composites, LLC is a major supplier, along with Cornerstone Research Group, Inc., Brayton Energy, LLC, PC Krause and Associates, and EaglePicher Technologies, LLC.
The XRQ-73 aircraft will be a Group 3 UAS weighing approximately 1,250 pounds. First flight of the XRQ-73 is expected by year-end 2024.
DARPA’s NextRS hypersonic bomber project is setting the stage for the future of U.S. air dominance, promising MACH 5+ speeds, stealth, and unmatched strike capabilities.
Key Point #1 – Designed as a potential NGAD successor, this bomber could revolutionize warfare with its ability to evade enemy defenses, deploy hypersonic missiles, and even target satellites.
Key Point #2 – However, budget concerns and technological hurdles could threaten the project’s survival. With DARPA and the Air Force Research Lab working on a prototype by the 2030s, the NextRS could be the ultimate high-speed strike platform—if it ever takes off. Will this futuristic bomber become reality?
The B-21 Raider has many defense analysts excited about its stealth, range, and power. The bomber will be produced regularly in the coming years and is currently in flight-testing mode.
Some generals and observers believe that at least 100 or as many as 200 B-21s could be built. But the futuristic Defense Advanced Research Projects Agency (DARPA) is again looking many years ahead and has its next-generation bomber that will improve the B-21.
DARPA is working on a hypersonic bomber concept and hopes to build a prototype soon. It’s called the Next Generation Responsive Strike (NextRS) program.
This multi-mission stealth warbird can take on ground strike roles and deliver intelligence, surveillance, and reconnaissance data to the warfighter.
This NextRS- at least it is hoped – can fly at speeds over MACH 5.
Could It Be an NGAD Bomber?
The secretive think tank envisions the NextRS airplane as the next step after the Next Generation Air Dominance (NGAD) fighter, which is slowly winding its way through the Air Force acquisition process as Secretary of Defense Pete Hegseth ponders its future. The NGAD may even be paused indefinitely as it is under further review.
Powerful Engine Powers the Ultra-high Speed
The main asset of NextRS that is most interesting is the engine.
With its turbine-based combined cycle engine, this propulsion plant will have an estimated thrust range of 30,000 to 38,000 pounds. Since it is traveling at MACH 5 or higher, the airplane will have high levels of survivability and maneuverability that will enable it to avoid air defenses.
This airplane would be perfect for a shock and awe bombing and cruise missile attack to blind enemy radar and command and control centers in the opening days of warfare.
DARPA is working with the Air Force Research Laboratory (AFRL) for the prototype of NextRS. Both entities want to have the design piece squared away by the end of the 2020s.
This will evolve as an ultra-high-speed strike machine that could see additional research and development by 2030 and first flight by the early 2030s.
The NextRS is considered a “Y” plane that should be headed to the engineering and manufacturing development phase if all goes according to plan with DARPA and AFRL.
Interestingly, NASA may have a role in this research work, which leads one to wonder if NextRS can become a near space bomber that could use long-range air-to-air missiles or lasers to take out satellites. This could mean that NextRS could have a dual role with the Air Force and Space Force.
The Aerospace Projects Office at DARPA is leading the efforts with NextRS, and this is a “black” program that resembles a Skunk Works classified concept, so many details are under wraps.
The Aerospace Projects Office does not even appear on the DARPA website.
Why Not Just Launch MACH 5 Missiles?
One question that came up on a thread on X about NextRS is why this NextRS bomber is needed when the Air Force could just launch hypersonic missiles instead.
Defense analyst Alex Hollings replied on X, “An air-breathing hypersonic missile means building a scramjet propulsion system and rocket booster for every single target, just to embed the guidance system and scramjet in the foundation of their house. You only need to build a bomber’s engines, guidance once.”
The key part of NextRS is its re-usability. However, questions remain about the futuristic bomber. Will it be manned or unmanned? There will likely be an unmanned option to go along with live pilots who could use the NextRS as a drone mothership that can control remotely piloted or autonomous Collaborative Combat Aircraft (CCA). This could help with recon duties and targeting and allow the CCA drones to launch their missiles and bombs.
The next question is price for NextRS. The B-21 Raider bomber is a whopping $780 million per unit. That gives you an idea of the amount of money involved. With research and development costs, the NextRS will need an expensive budget line item for many years.
This may be the project’s undoing. Some are questioning the need for NGAD, and it would be challenging to envision the NextRS coming to fruition without the NGAD coming first.
However, DARPA has a different budgeting structure than other airplane acquisition programs and the Aerospace Projects Office gets its line item that would likely be apart from the other Air Force acquisition programs. This budgetary item would stand alone from NGAD and the Collaborative Combat Aircraft projects.
The NextRS program is exciting, especially if the bomber can fly at MACH 5 or more incredible speed. The engine would be topnotch and could be placed on the NGAD someday which could lengthen the life of that airplane should it be produced in numbers.
The DARPA budget can keep the NextRS running for the next few years until the program matures. However, watchdogs overseeing futuristic airplanes could perceive the NextRS as aspirational but unnecessary.
This question of resources and money could be the undoing of NextRS despite its compelling advantages.
A routine test turned into a surprise discovery when DARPA’s atmospheric sensors picked up something unexpected—courtesy of a falling SpaceX Falcon 9.
While listening in on the atmosphere, a team of researchers from the U.S. military’s Defense Advanced Research Projects Agency (DARPA) picked up unexpected disturbances caused by a SpaceX rocket plummeting through the atmosphere toward its landing site.
DARPA’s AtmoSense program seeks to use Earth’s atmosphere as a global sensor by measuring acoustic and electromagnetic waves propagating through the atmosphere, and attempting to trace them back to a specific disturbance event that took place on Earth. In doing so, DARPA hopes to be able to trace underground explosions or other national security threats using the signals detected from the atmosphere.
During its latest round of listening to the atmosphere, a team used AtmoSense to study sound waves created by controlled explosions in New Mexico. While conducting this work, the team behind the program made an unplanned discovery after noticing something unusual in the sensor data.
“As the team was looking at the data, they saw a huge drop in what’s called total electron content that puzzled them,” Michael Nayak, program manager of AtmoSense, said in a statement. “Imagine that you have water going through a hose. That’s a flow of electrons, and if you put your fist in front of the hose, you’ll notice a significant drop in water volume coming out of the hose.”
After analyzing the data, the team was able to trace the disturbance to a SpaceX Falcon 9 rocket reentry that took place on the same day as the test. “Then they decided to pull other SpaceX reentry data, across dozens of launches, to see if they could spot a similar electron drop,” Nayak added. “The phenomenon is highly repeatable.”
Using AtmoSense, the team inadvertently discovered a new technique to identify objects reentering through Earth’s atmosphere, according to Nayak. The researchers behind the program will share the most recent results from AtmoSense during an upcoming virtual workshop being held from April 15 to 17.
Falcon 9 is the hardest working rocket in the game, with over 450 missions under its belt. SpaceX’s Falcon 9 is a partially reusable, two-stage rocket that launches payloads into orbit, then returns to Earth for a controlled landing, allowing its first stage to be recovered and reused.
The DARPA Robotics Challenge is over. It will certainly be remembered as one of the defining robotics competitions of the decade—full of drama, hardship, and inspiration. We brought you as much of it as we could, including a detailed look at the winning robot, a fun compilation of robots falling, and our impressions of the first day of the competition. And we still have a lot more to come! But for now, to cap it all off, here are things that stood out to us about the final day of the DRC Finals, and a hint of what to look forward to in the future.
People Love Robots
We know people love robots, but seeing thousands of eager spectators filling the Fairplex’s grandstand, cheering for a bunch of machines when they succeeded, lamenting when they fell or failed, and celebrating their human creators, gave us a new perspective on how much people love robots and seem to connect with them. As DARPA program manager and DRC organizer Dr. Gill Pratt beautifully put it:
“Why would anyone sit in the sun and heat, watching a machine take up to an hour to go through eight simple tasks that you could do in 5 minutes? The new discovery we made here is that there’s some incredible untapped affinity between people and robots that we saw for the first time today. Ordinary people, not roboticists, felt this identity, sympathy, empathy for the robot. The thrill of victory, the agony of defeat. . . . When the robot succeeded, they felt they succeeded. . . . I see potential for robots to connect with people and create a society where people actually feel better. Some people will say ‘That’s creepy, it’s a machine,’ except it’s a fact of life, we saw it today, people connecting with machines.”
Software Is a Hard Problem
At an event like the DARPA Robotics Challenge Finals, it’s easy to focus on the robotic hardware that’s out there actually doing stuff. What we don’t get to see is everything going on in the garages hundreds of meters away from the course, where the operators (“robot drivers”) are receiving data from the robot’s sensors, trying to interpret it, and telling the robot what to do. Given enough time, drivers could teleoperate their robots through every single task at the joint level, but that would take hours, and teams didn’t have that much time—they had to complete all eight tasks in less than 60 minutes.
One of DARPA’s main goals with the DRC was to advance how robots and their human operators can work in concert to perform difficult tasks. The key to achieve that is not only better sensors and actuators—what we need just as much is better software. At the DRC Finals, we saw some progress in that direction. We saw the operators relying on tools that made the most of minimal perception data and allowed them to command the robots to execute actions with some degree of autonomy.
We must say we wished we had seem even greater perception and planning autonomy. We felt that there was still too much teleoperation, in part because the course was not too hard (more on that later), and operators could just manually control the robots and tell them what to do step by step. For example, in the rubble task, we wanted to see teams push a “Go Over Rubble” button that would make the robot scan the terrain, compute a viable path, and then walk over the obstacles—all done autonomously. Instead, we saw the human operators looking at images from the robot’s camera and lidar and telling their robots exactly where to place their feet. The same happened with other tasks. Some may call that a semi-autonomous operation, but others may say it’s pure teleop.
So, there’s still much more we need to do. Autonomy is really hard, but it is key to the future of disaster robots, because we don’t want to have to rely on experienced robot drivers to get tasks like these done. Relatively untrained users will need to be able to interface with robots in a way that they can understand and readily use, and that means letting the robot (or more accurately, the software) deal with as many complex tasks as it can.
Falling Is Usually Okay . . .
There were far fewer falls on Day 2 than Day 1, and with a few exceptions, most robots were able to reset in under 10 minutes and keep right on going. From what we could tell, none of the ATLAS teams expected that they’d survive falling as well as they did, and for our part, we were expecting shattered limbs and hydraulic fluid explosions. There were only a few of those, and apart from some cosmetic damage, the hardware stood up pretty well. MIT’s ATLAS robot fell on egress on the first day and broke its right arm. The team switched some stuff in software and was able to continue on with only their left arm on that day. Repairing the arm later turned out to be tricky, and they had to work all night ripping most of the guts out of their robot. They made it, though, and then fell once more on Saturday. Considering that approximately zero of these robots were really designed to fall down ever, the uptime on them was an impressive achievement.
Robots falling during DARPA Robotics Challenge
That said, it was a bit disappointing that, with one exception, no robots fell over and got back up again on their own. With that same exception, no robots fell over and even attempted to get back up on their own. From the sound of things, teams figured that if their robot fell, it would be rendered unrecoverable, so nobody bothered trying to figure out how to do it.
Part of the problem here is that it terms of hardware, it doesn’t make much sense to design a robot to be able to get up from a fall and then do all kinds of other tasks, because you risk massively over-engineering your robot. But, falling happens, and it’s going to continue to happen, because it happens even to us humans, and we’re pretty reliable at walking. If legged robots are ever going to be truly effective, falling and getting up is something that they’re absolutely going to have to crack.
Maybe we need a new challenge where a humanoid is nudged, falls over on a hard surface, and has to get up again all by itself without having sustained major damage. We would watch that!
. . . Except When It’s Catastrophic
More robots falling during DARPA Robotics Challenge
There were a few unlucky robots that hit the ground hard and couldn’t recover. We saw Team HKU’s ATLAS falling in the first hours of Day 1 and it seems that it never recovered.
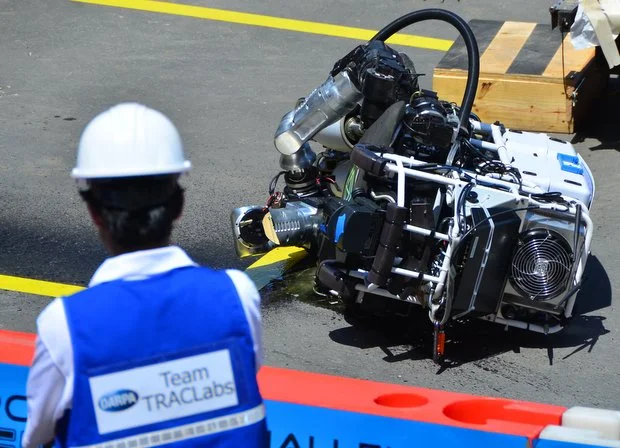
The most disastrous fall happened to Team TRAC Labs right at the end of their egress on Day 2. The TRAC Labs ATLAS got out of the vehicle and onto its little egress platform, and then lost its balance and slowly toppled over. On impact, there was a two-meter spray of hydraulic fluid, and the robot lay here, bleeding into a slowly growing puddle of green goo, until it was hoisted up and hauled away.
Ouch.
Incidentally, Boston Dynamics brought along an eighth fully functional ATLAS, not as a loaner, but as a sacrifice: if necessary, teams could harvest parts from the spare to keep their robots running.
ATLAS Is Awesome. ATLAS Is Awful.
Speaking of ATLAS, let us say right off the bat that we’re big fans of Boston Dynamics. Those guys are amazing. ATLAS is a beautifully engineered hydraulic-electric humanoid, with powerful legs, capable arms, and impressive sensor suite. On Day 2, Team IHMC and its ATLAS had a flawless run, performing all tasks with dexterity and confidence. They ended up placing second in the competition only because it took them just a little longer (6 minutes) than Team KAIST, the winner, to finish the course. Other teams that used ATLASES (ATLI?) like MIT and WPI-CMU also performed well (seventh and eighth place, respectively), completing most of the tasks, including hard ones like egress. It’s totally possible that an ATLAS team could have finished first at the DARPA Robotics Challenge, and there’s no question in our minds that ATLAS is a cool robot to work with, and watching it compete was thrilling.
But ATLAS is not perfect. It’s big, dangerous, finicky, and, at well over $1 million each, a very pricey robot. Using ATLAS requires insanely strict safety precautions. We were told that the robot’s legs are so strong, it could kick cement blocks into pieces. Sometimes it would move its limbs so violently that it ripped apart its own hydraulic lines. Teams always practiced with ATLAS attached to safety belays, and few tried to teach the robot how to get back on its feet in case of a fall. Its battery didn’t last very long, and it could easily overheat. Fixing it was also tricky, and something the teams often couldn’t do on their own; Boston Dynamics had to come and do the repairs.
So, yeah, ATLAS is a beast. Humongous, hugely expensive, high maintenance. Knowing what we know post-DRC, we think it’s fair to ask if that is the kind of machine that we should be looking at as we build the next generation of disaster robots. We also wonder what will happen to ATLAS now—will DARPA allow any of the teams to keep or buy one for its own use? Would anyone even want one, knowing how costly it is to maintain it? For what it’s worth, we think that if they all end up at the Smithsonian, helping to inspire future generations of robot engineers, that wound’t be too bad.
Right Now, Not Walking Is a Big Advantage
Of the top three robots in the DRC Finals, third place went to a robot that rolled on tracks; second place went to a walking biped; and first place went to a biped that had wheels that it could use instead of walking. Three completely different techniques, but after watching two days worth of robots falling over, we’ve been most impressed by robots that at least have the option to avoid bipedal walking.
Hybrid designs seemed to perform the best: KAIST had wheels and legs, CHIMP had tracks and legs, and JPL’s RoboSimian had a quadrupedal design with butt-wheels. In each of these cases, the robot had good mobility without having to worry about falling over all the time.
It’s important to note, however, that in a real disaster area, wheeled mobility may be close to useless, so despite how well the wheeled designs did at the DARPA Robotics Challenge, it shouldn’t minimize the future potential and value of bipedal walking. As IHMC pointed out during a post-competition workshop, bipedal walking lets you move across areas where you only have a footstep-sized safe place to move, and, unless you can fly, no other mobility design does that.
The Course Was Definitely Not Too Hard
The consensus from teams seemed to be that the course was definitely not too hard, and honestly, we were expecting something harder. We had sort of figured that DARPA would chain the full versions of all the Trials tasks together into one mammoth disaster course. They did combine itty bitty versions of most of the tasks, which was good, and when Gill Pratt commented that the Finals course was “10 times harder” than the trials course, we’re guessing it was because of the stricter time limit, the egress task, and DARPA’s shenanigans with the wireless communications between teams and robots.
Considering that many teams did pretty well, was the course too easy? KAIST said that in practice runs, they could complete the whole thing in 28 minutes flat, but they didn’t manage to pull that off in the competition itself. It’s worth noting that quite a few teams finished just under the 60 minute mark, and a few ended up on the stairs and ran out of time, so it’s not like everyone was just ripping right through everything. And being able to complete the entire course just meant that time was a significant factor, which DARPA certainly intended. Being just a few minutes faster made a million dollars worth of difference to one team, and in a real disaster, it could be the difference between saving a life, and being too late.
Robots vs. Door
A recurrent joke at the DRC was that, if we needed to stop the robopocalypse, all we had to do is close our doors. The door task—pulling down a door knob, opening the door, and going through it—proved surprisingly tricky for a number of robots. Some of them seemed physically capable of performing the task; what appeared to be lacking was better perception and control to, among other things, manipulate the knob and avoid bumping into the door frame. At least one robot seemed so terrified of the task it just collapsed backward.
The Wall Task Was Especially Tricky
Skipping the wall task completely was common; also common was bypassing the wall task, doing the surprise task, and then (maybe) coming back for the wall if there was a comfortable amount of time left. The task involved getting to the drills, seeing the drills, grasping the desired drill (a regular drill or a cut-out tool), turning the drill on, repositioning the robot near the wall, seeing the shape, and then (finally) getting the robot to manage a heavy, moving, vibrating power tool while it chews through drywall.
Generally, if a team decided to attempt a task, they’d either finish it or fall over trying, but several teams were forced to abandon the wall task after they dropped the drill or the drill shut off (it was programmed to operate for 5 minutes; after that, the robots had to turn it back on) and there was not enough time to start all over again. At least two robots, MIT’s ATLAS and JPL’s RoboSimian, even tried punching the wall in a desperate attempt to complete the task.
Not Enough Surprise in Surprise Tasks
As it turns out, we had a pretty good idea about what the surprise tasks were going to be in advance of the DRC Finals, and so did most of the teams. We hadn’t guessed button, but we had guessed both switch and plug. Of these three, the teams said that plug was by far the hardest. But, these tasks weren’t surprises in the sense that the teams had an “OMG how do we do this?” moment when the task was revealed (that was our hope). Instead, it was just a sort of, “okay, we need to grasp and move in these ways.” The teams even rapidly assembled copies of the switches and plugs at their garages to practice before their official run. It did add a little bit of variability, which is what DARPA was going for, but we think that teams could have handled even more.
During the media briefing after the finals concluded, Gill Pratt explained that DARPA used the surprise tasks to “tune” the difficulty of the DRC, and that DARPA was concerned about the fact that at the rehearsal run no teams had practiced off-belay, so they decided to tune down the surprise tasks pretty heavily.
Lots of Creativity in Driving Techniques
Robot crashes vehicle during DARPA Robotics Challenge
Generally, all of the robots used very similar techniques to complete a given task. Driving was the big exception, and it was fascinating to watch. Teams were allowed five minutes without tools to modify the vehicles for their robots, but even under those constraints there was a lot of creativity on display. The robots used all kinds of mechanisms with levers and cables to turn the steering wheel and press the accelerator; we don’t think any robots bothered to use the brake.
Most robots (and ATLAS in particular) were too bulky to easily sit in the driver’s seat, and even if they had been able to wedge themselves in there, it would have made egress much more challenging. The solution was to get ATLAS to drive while keeping it as far out of the seat as possible, which involved some occasionally bizarre solutions to allow the robots to actuate the controls.
Team TRAC Labs had their ATLAS hold onto what looked like a square piece of wood with a bunch of nails sticking out of one side; the robot would reach behind it and engage the nails into a cog attached to a cable that ran all the way across the vehicle to the steering wheel. When the robot twisted its gripper, it would twist the cable, steering the vehicle. Their ATLAS dropped the block before it exited the vehicle, and I think this makes it the only robot that we saw using a bespoke, disposable tool.
The ATLAS teams favored platforms that folded up against the side of the vehicle that the robot could kick down to turn one giant step down into two less-giant steps down.
Humanoid getting off car during DARPA Robotics Challenge
Leo, Lockheed’s ATLAS, also had a built-in egress assist system, but instead of a drop-down platform, the robot slid out of the vehicle on pivoting metal rails, which allowed it to skip the steps down that robots using platforms had to take. To control attached to a rope. Adorable.
The very best egress technique, though, came from JPL’s RoboSimian. “I thought that the way they did that, seeing this spider-like thing getting out of the car in this dance, it was an elegant and beautiful thing to see,” Gill Pratt said. We couldn’t agree more.
Adaptation Is a Huge Challenge
Essentially all of the robots in the DARPA Robotics Challenge could, in principle, complete all of the tasks on the course under ideal conditions. The challenge is dealing with things that are unexpected, and even tiny little changes, or small errors in programming or commands, can lead to catastrophic failures.
For example, we asked IHMC what led to the two falls that they had during their Day 1 run. The fall on the rubble was because the foot placement was too aggressive, and a step forward and down maxed out ATLAS’ ankle, leading to a loss of balance. The fall off the stairs was a software bug that caused the robot to think that it had a full foot on a stair when it only had a half foot on a stair, and when it tried to step up, it lost its balance and fell over. It doesn’t take much.
This is why robots are not ready for real disasters, and won’t be for quite a while, but this is a critical start, and for their complexity the robots that competed in the DRC Finals are more versatile and adaptable than any we’ve seen before.
NIMBRO robot during DARPA Robotics Challenge
Also, and this is more of an observation than a conclusion, it’s worth noting that no legged robots tried to deal with the debris, and no wheeled robots tried to deal with the terrain. Teams understandably took the easiest course open to them, but offering options like these meant that robots weren’t challenged in the Finals as much as they were in the Trials. Robotics embraces specialization, but they’ll have to be generalists to be effective in a real disaster area, dealing with both terrain and debris. That’s the only downside of making the DRC Finals so competitive: it created a focus on winning a specific competition as opposed to a focus on making the most capable and versatile robot, since those two things aren’t always the same.
Chimp Is Still Awesome
KAIST and IHMC had amazing runs, and they absolutely deserve their first and second place finishes. Our favorite run, though, is still CHIMP’s Day 1 performance, where all kinds of things went wrong (including a fall!) but the robot was able to recover and still score 8 points in under 60 minutes. And to us, that could make them the most successful team to compete in the DARPA Robotics Challenge, at least in terms of versatility and adaptability. Lots of teams did great when nothing went wrong, but CHIMP did great even when things did.
What’s Next
DARPA’s goal with the DRC was not to develop a robotic platform that could be immediately deployed into disaster areas and be helpful. None of the robots that competed last weekend are ready for that. What DARPA is all about is high risk, high reward, long-term technological pushes, and that’s the context that the DRC should be considered in.
Ten years ago, DARPA held another kind of challenge: the Grand Challenge and Urban Challenge, for autonomous vehicles. It was a success, with a handful of robotic cars and trucks completing the courses. Today, we’re just starting to see autonomous vehicle technology that’s anywhere close to being ready for mainstream adoption. DARPA was the genesis of this, but it takes a long, long time to go from DARPA challenge to a technology at a readiness level that we can benefit from. So when we have real disaster robots in five or ten years, we can thank the DARPA Robotics Challenge for being where it all began.
It’s not likely that we’ll see another humanoid challenge of the same magnitude for some time, but there are still a few things to look forward to. Japan will be hosting some sort of robot challenge to coincide with the 2020 Olympics in Tokyo, which should be good. But what we’re really excited about is an announcement from NASA that they’re getting ready to award a handful of Valkyrie robots to university teams in preparation for a robotics challenge intended to explore the possibility of sending humanoid robots into space, and eventually, to Mars.
The DARPA Robotics Challenge is over, but to paraphrase Dr. Gill Pratt at the closing ceremony, “Are we done with the work that needs to be done in robotics? NOOO!”
Also:
DARPA’s New Mach 5 NextRS Hypersonic Bomber Summed Up in 4 Words
Also:
DARPA Unintentionally Invents New Rocket ‘Radar’ Thanks to SpaceX
Also:
DARPA Robotics Challenge: Amazing Moments, Lessons Learned, and What's Next